Sistemas Aeroespaciales y de Defensa
Sistemas críticos > Sistemas robustos en condiciones extremas > Sistemas de software
Fecha: 2013
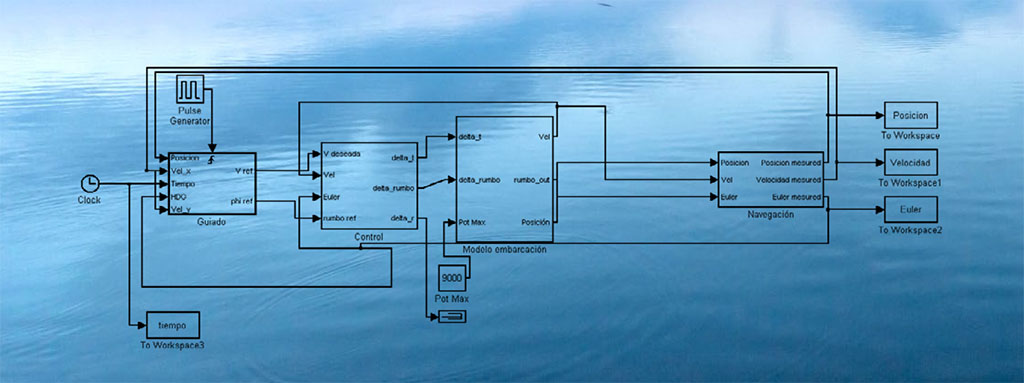
Desarrollo de un piloto automático para vehículos acuáticos pilotados por control remoto.
Los algoritmos de control y guiado tienen en cuenta las corrientes de agua y las restricciones del entorno a la hora de calcular la trayectoria óptima.
Este piloto automático es apto para su uso tanto en mar abierto como en ríos y está diseñado especialmente para la realización de misiones de vigilancia gracias a una gran autonomía y una excelente maniobrabilidad.
El sistema está formado por dos elementos principales:
¬ Subsistema a bordo
¬ Subsistema de control en tierra
Subsistema a bordo
¬ Sistema de navegación integrado. Sistema de guiado y control basado en la tecnología FPGA.
¬ Conjunto de sensores integrados:
- Unidad de navegación (COMPASS, IMU y GPS)
- Medidor de profundidad
- Sensor de velocidad
¬ Sistema anticolisión. Detección y previsión de elementos imprevistos en la trayectoria definida.
Subsistema de control en tierra
¬ Consola de navegación remota. Supervisión en tiempo real y modo de selección de operación automático/manual.
¬ Generador de trayectoria optimizada. A partir de los distintos puntos de ruta definidos, el sistema genera una trayectoria óptima de bajo consumo y alto rendimiento.